We’re here to help you with the OpenRC tractor connections. Check pictures for more details (click them to zoom).
⇓ Download OpenRC tractor from here
Remember that you’ll need
Basic control:
- 1 micro servo
- a 2 channel radio transmitter and receiver.
- A motor speed controller (ESC)
- One 370 motor and differential (recommended), one 540 motor or two micro-motors, depending on the version of the tractor you chose to print.
- A battery
Full control:
- 3 micro servos
- a 3 channel radio transmitter and receiver if you want to use the rear arms.
- A Y servo cable to move two servos together
- A servo reverser to invert the direction of one rear servo
- A motor speed controller (ESC)
- One 370 motor and differential (recommended), one 540 motor or two micro-motors, depending on the version of the tractor you chose to print.
- A battery
Steps:
- Cables from the motor (or motors) should go connected to the speed controller (ESC).
- The speed controller black-red-white cable should be connected to the appropriate channel of the receiver (in my case channel 2)
- Direction servo should be connected to the appropriate channel of the receiver (In my case channel 1)
- (full control only) One rear arm servo needs a servo reversed because the servos are mounted in opposite direction. If you don’t use one, one servo will go up and the other down.
- (full control only) Once one servo has been reversed, both rear arm servos should be connected to one Y cable in order to join two cables into one.
- (full control only) Now that we have only one cable coming from the rear arms, this should be connected to the 3rd channel.
- Last step would be to connect the battery and… Enjoy!!
Hope this helps!
If you have more questions visit the FAQ section.

1-Motor mod connections
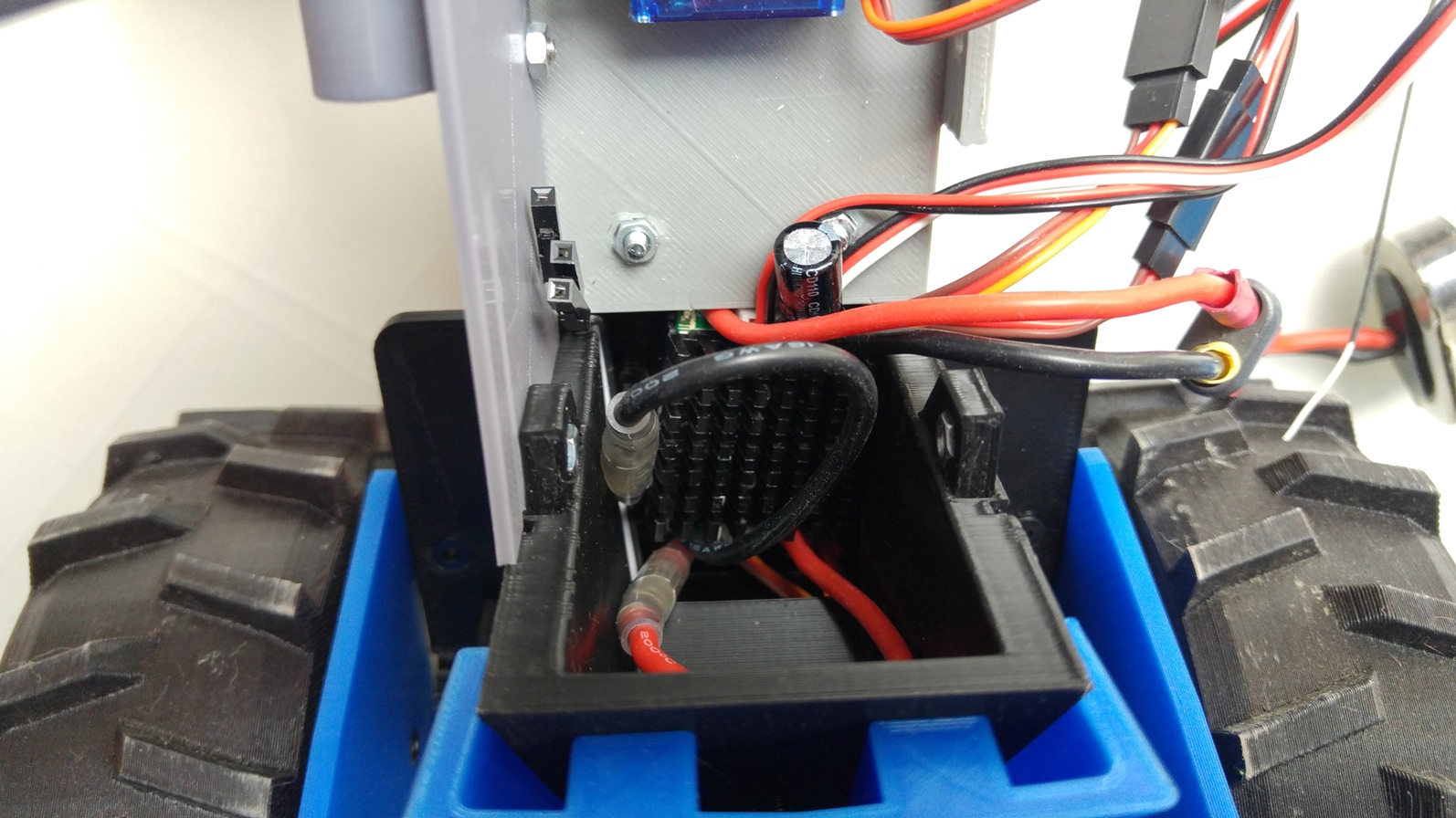
2-Motor-mod esc detail

3-Receiver connections
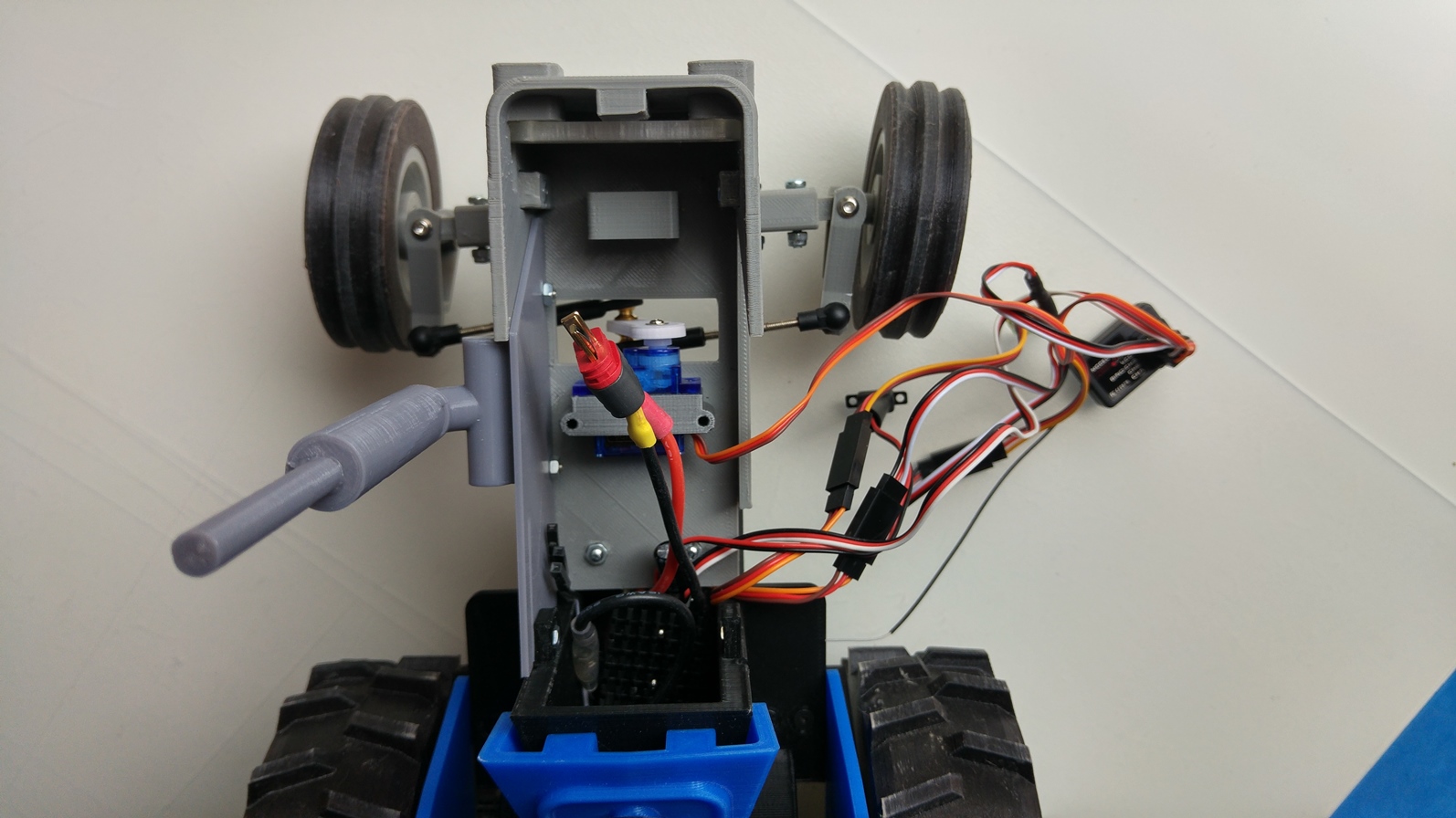
4-Rear servos with a Y to one channel (one servo previously reversed). Steering servo to other channel.